Simulation of the reception, picking and expedition of ALMIRALL labs of Sant Andreu de la Barca (Barcelona)
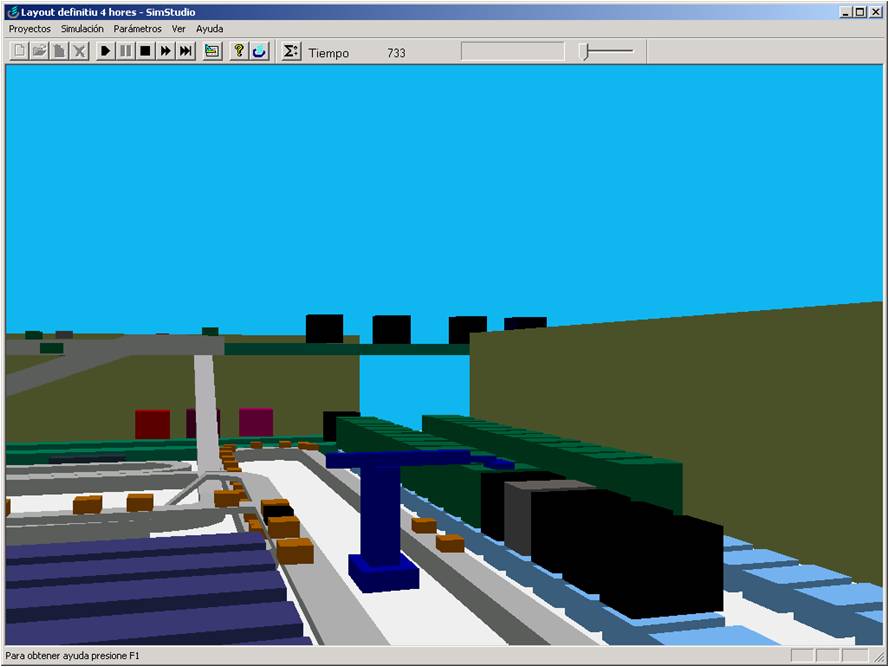
The main objective of this project was to help in the design of a new plant for the reception, expedition and picking of the ALMIRALL labs in Sant Andreu de la Barca (Barcelona). The model must allow the analysis of different configurations. The figure represents the virtual reality representation of the plant shown in the model.
 |
 |
 |
Internet reference:
http://zeisel.upc.es/logisim/Logisim.asp?anar=portafoli&item=produccio&subitem=3
ETFA 1999
http://ieeexplore.ieee.org/xpl/RecentCon.jsp?punumber=6597 18-21th Octoberl 1999, Barcelona, Spain. |
 |
ETFA09 Presentation
Simulation of reception, expedition and picking areas of a pharmaceutical products plant.
Authors: Josep Casanovas García Wilfredo Pérez Rivero Jordi Montero García Pau Fonseca Casas
Introduction
Detailed simulation model of some main processes in a pharmaceutical products plant involved in deep structural changes due to the merge of different new company activities. s Using an Object Oriented Simulation methodology called LeanSim, specially designed to create models for manufacturing and logistics systems.
s
Situation
Order’s expedition is partially automated. s Storage of complete production is organized for their later distribution. s Merge of several company units. s Increase in throughput is required and bottlenecks problems are expected for intermediate and terminated product.
s
Planned modifications
Robot carrying out picking of complete boxes. s Evaluate cost and potential use of automatic dispensers for the picking of product fractions. s New politics of orders preparation s Increase in production levels
s
Expected performance
Maintain current quality and due time, evaluating alternative shift policies to reach 24 maximum hours to customer service. s Production cost and picking of fractions should be reduced. s Alternatives comparison and possible decisions.
s
Project structure (I)
Analyze month type demand s Plant capacity analysis s References assignments to each picking types. s Use of automatic dispensers, necessary channels and approaches for the dynamic channels recharges.
s
Project structure (II)
Optimal size for pallets expeditionreception area. s Re-palettition unit dimension and associated processes. s Packaging analysis with the objective of diminish picking of units. s Determine scenarios and more interesting alternatives scenarios and simulate them.
s
Development phases
Macroscopic specification and modeling. Only considering main plant objects. s Microscopic model with highest level of detail in machines, conveyors, resources and other elements.
s
Software technologies (I)
s
Object Oriented
• • • • • Quick development Quality increased Easier maintenance Code and user interface reusability Risk reduction in development of very complex systems
Software technologies (II)
s
Component based modeling (COM)
• Binary standard for component interconnection • Programming language independence • Implemented in multiple platforms • Allows robust evolution of applications and systems based on components • Communication among components, in different processes or in networks
Leansim methodology (I)
Identify objects s Define state list and draw a finite state machine diagram for each object s Define channels to communicate objects each others s Define an external event list for each object s Define a SDL flowchart, peer to peer
s
Leansim methodology (II)
s
SDL State’s diagram (“Reposició” Object)
Leansim methodology (III)
s
SDL State IDLE (“Reposició” Object)
Leansim methodology (IV)
s
SDL State service (“Reposició” Object)
Visual Representation (I)
Virtual reality simulation environment. s User can observe the system modeled in the simulation like a replica of the real system. s Easier model validation increasing overall process credibility from final user point of view s Ability to become a powerful operators training tool.
s
Visual Representation (II)
Small errors or inconsistencies debugging during the specification and better understanding of the model. s Shows a nearest representation of the real image of the studied system. s Interactive representation integrated during model execution.
s
Model parameters
Visual representation (I)
Visual representation (II)
Visual representation (III)
Visual representation (IV)
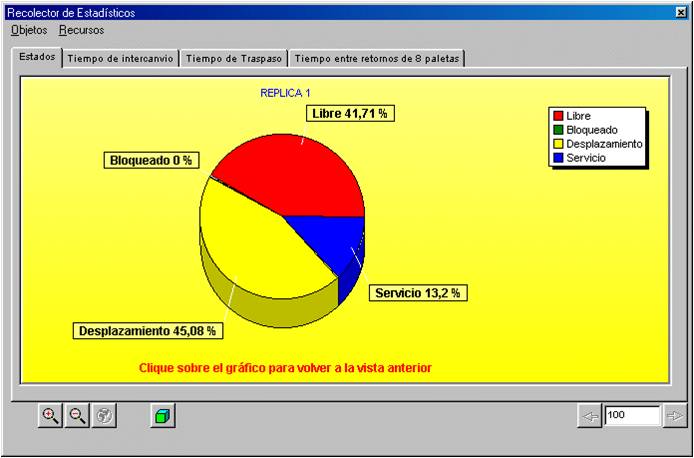
Simulation results
Results (I)
Bottlenecks in each of the scenarios s Saturation of the simulation objects and consequently of the real objects (robot, robot assistant car, picking station) in the final layout s Shift organization with different levels of saturation. Operations synchronization.
s
Results (II)
Other performance measures. Equipment speed calibration and adjustment. Not served shipments,… s Robot design, banks, extraction strategies evaluation (extraction priority for star-class references, extraction priority for pallets, re-sending references to the robotized silo,…)
s
Demo

Video Almirall
This video shows the Almirall - Prodesfarma model.
|
This video shows the execution of the Almirall - Prodesfarma model. The model was developed using SDL formal languaje, implemented with C++ using Direct X. |